·Sistem game Pong dapat
diimplementasikan menggunakan Arduino Uno, layar OLED, dan dua joystick. Sistem ini adalah permainan saling berusaha
memasukkan bola ke area lawan menggunakan paddle masing-masing player, yang diatur dengan dua joystick.
·Sistem game Pong dapat
diimplementasikan menggunakan arsitektur FreeRTOS dengan lima task, yaitu draw, readJoystick, drawCentralLine,
drawBall, dan drawPlayer.
·Untuk menghindari terjadinya deadlock pada penggunaan shared resources, diimplementasikan semaphore dengan delay di
masing-masing task
Pong adalah videogame pertama yang sampai di pasar massal. Untuk pertama
kalinya dalam sejarah, konsep "video game" dibawa ke rumah keluarga,
berkat Atari 2600 - jadi kita dapat melestarikan game bersejarah ini.
Sekarang, Anda bisa menghidupkan kembali gameplay (yang memang agak
membosankan) menggunakan Arduino dan beberapa komponen umum.
Tidak mungkin
anak perempuan Anda akan melepaskan Nintendo DS-nya, dan ini tidak hanya akan memberikankesenangan bagi seluruh keluarga - tapi ini adalah perminan yang mengagumkan
dan mudah untuk memperbaiki pengkodean Arduino Anda.
Kami akan membuat dua pengendali dasar, dan video akan menampilkan TV
Anda melalui kabel video komposit standar.
Ambil steker RCA Anda dan lepaskan lapisan luarnya. Kumpulkan perisai,
putar dan tempelkan ke satu sisi. Ini adalah medanmu. Di tengahnya harus
ada kabel lain dengan pelindung plastik - sekali lagi, strip ini sehingga Anda
memiliki garis sinyal Anda.
Solder resistor 470 ohm dan 1k ohm ke
garis sinyal tengah steker RCA Anda - ini memberikan sinyal sinkronisasi dan
sinyal video yang sebenarnya, digabungkan untuk menghasilkan input video
analog. The 470 ohm resistor harus slot ke pin IO digital D07, sedangkan 1k ohm
resistor pergi ke pin D09.
Pin ini diatur oleh perpustakaan yang kita
impor, jadi Anda tidak bisa mengubahnya. Salah satu pin GND Arduino Anda harus
masuk ke perisai (di luar) RCA.
Sekarang Anda bisa terus maju dan
memasukkan contoh; Walaupun keduanya PAL dan NTSC disediakan, seharusnya tidak
terlalu penting dengan TV digital modern - demo NTSC bekerja dengan baik. Tancapkan ke TV Anda,
dan harus mendapatkan kubus 3D retro yang cocok
.
Test Analog Potentiometer Inputs
Setelah output TV bekerja,
sekarang mari kita pergi dengan pengendali. Kabel dari "pot" tidak
begitu penting - masing-masing harus memiliki 3 pin, dan yang sentral hampir
selalu menghasilkan sinyal output. Kawat itu ke A0 dan A1 (satu untuk
masing-masing pot). Pada salah satu sisi pin - tidak masalah yang - kawat atas
5 V. Pin lainnya di sisi lain harus di ground.
Di sini setelah menempatkan mereka
berdua menghadap masing-masing di papan tempat
pemotongan, karena hanya memiliki kabel pendek. Untuk produk yang dipoles, Anda pasti
ingin menggunakan beberapa kabel jaringan lama untuk memberi jarak sedikit
(sehingga Anda bisa benar-benar duduk di sofa untuk dimainkan).
Selanjutnya, muatkan salah satu sketsa contoh dasar yang menyertai
Arduino - masukan analog satu. Demo ini akan menyalakan LED onboard lebih cepat
atau lebih lambat, tergantung pada input pada A0.
Ini tidak menguji bagian A1 lainnya, tapi jika Anda memasang A0 dengan
benar maka kami tidak dapat melihat bagaimana Anda akan membuat kesalahan pada
A1, jadi anggap itu bagus dan terus berlanjut.
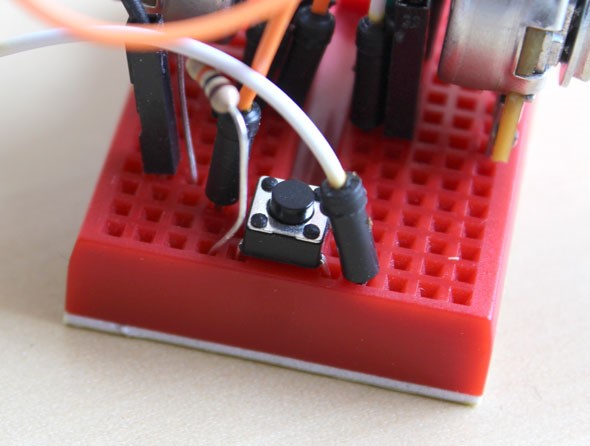
Menambahkan Start Switch
Akhirnya, kita akan menambahkan tombol
start pada D02. Lihat diagram pengkabelan di sini untuk bagaimana melakukannya.
Peralihan ini akan digunakan untuk memulai permainan saat berada di menu.
The Pong Code
Kami menggunakan beberapa kode yang
aslinya ditulis oleh Lamonica, dimodifikasi oleh duboisvb untuk dua pemain, dan
diperbarui sendiri untuk menggunakan versi terbaru perpustakaan TV out terbaru.
Anda bisa melihat dan mendownload kode dari pastebin ini.
Ini cukup panjang tapi kode sederhana yang
seharusnya tidak memerlukan penjelasan. Seperti kebanyakan game,
game ini bergantung pada status permainan (menu, game dalam game, game over),
dan membaca nilai masukan dari kedua pengendali dan setiap perulangan loop. Di
luar itu adalah metode untuk menggambar layar, bola, dayung, dan logika
permainan.
Perhatikan bahwa kode tersebut mencakup
keluaran audio juga: Kami tidak dapat menemukan colokan RCA lagi untuk
mengujinya, namun jika Anda memilikinya, maka pasang pin sinyal langsung ke
D11, dan Anda harus mendapatkan nada retro yang
cocok.
Arduino bahkan bisa melakukan TV tanpa pengkodean yang sangat
rumit; TV out library membuatnya sangat mudah. Bahkan jika Anda tidak memasuki
game retro, menggunakan TV dasar ini adalah cara yang bagus untuk memanfaatkan
peralatan yang ada sebagai perangkat monitor murah. Tentu saja Anda bisa
mengeluarkan warna output.
2. Reinforcement Learning (RL)
Reinforcement Learning (RL) sering digunakan. Anda mungkin telah memperhatikan bahwa komputer sekarang dapat secara
otomatis belajar bermain game ATARI (dari piksel permainan mentah!), Mereka
mengalahkan juara dunia di Go, simulasi quadruped belajar berlari dan melompat,
dan robot belajar bagaimana melakukan tugas manipulasi yang rumit. Ternyata
semua kemajuan ini berada di bawah penelitian RL. Kami juga tertarik pada RL
sendiri selama tahun terakhir: Kami bekerja melalui buku Richard Sutton,
membaca kursus David Silver, menyaksikan ceramah John Schulmann, menulis sebuah
perpustakaan RL di Javascript, selama musim panas yang diadakan di DeepMind
yang bekerja di kelompok DeepRL, Dan yang paling baru bernada sedikit dengan
desain / pengembangan OpenAI Gym, toolkit benchmarking RL baru. Jadi, sudah
pasti mengasyikkan setidaknya selama satu tahun ini,
Contoh RL di alam bebas. Dari kiri ke kanan: Deep Q Belajar
jaringan bermain ATARI, AlphaGo, Berkeley menumpuk robot Legos, simulasi
melompati quadruped secara fisik di atas medan.
Menarik untuk memikirkan sifat kemajuan terkini dalam RL. Kami
secara luas ingin memikirkan empat faktor terpisah yang menahan AI:
a.Hitung (yang jelas: Hukum Moore,
GPU, ASIC),
b.Data (dalam bentuk yang bagus,
tidak hanya di luar sana di suatu tempat di internet - misalnya ImageNet),
c.Algoritma (penelitian dan gagasan,
misalnya backprop, CNN, LSTM), dan
d.Infrastruktur (perangkat lunak di
bawah Anda - Linux, TCP / IP, Git, ROS, PR2, AWS, AMT, TensorFlow, dll.).
Mirip dengan apa yang terjadi di Computer Vision, kemajuan dalam
RL tidak didorong sebanyak yang mungkin Anda anggap sebagai ide baru yang menakjubkan.
Di Computer Vision, AlexNet 2012 sebagian besar merupakan varian Convnets tahun
1990 yang lebih kecil dan lebih luas. Demikian pula, makalah ATARI Deep Q
Learning dari tahun 2013 adalah implementasi dari algoritma standar (Q Learning
with function approximation, yang dapat Anda temukan di buku RL standar Sutton
1998), di mana perkiraan fungsi menjadi ConvNet. AlphaGo menggunakan gradien
kebijakan dengan Monte Carlo Tree Search (MCT) - ini juga merupakan komponen
standar. Tentu saja, dibutuhkan banyak keterampilan dan kesabaran untuk
membuatnya bekerja, dan beberapa tweak cerdas di atas algoritma lama telah
dikembangkan, namun sampai pada urutan pertama, pendorong utama kemajuan
terakhir bukanlah algoritme tapi (serupa Untuk Computer Vision) menghitung /
data / infrastruktur.
Sekarang kembali ke RL. Kapan pun ada keterputusan antara
bagaimana sesuatu yang ajaib terlihat dan betapa sederhananya berada di bawah
tenda, kami mendapatkan semua gelisah dan sangat ingin menulis posting blog.
Dalam hal ini kami telah melihat banyak orang yang tidak percaya bahwa kita
dapat secara otomatis belajar bermain game ATARI paling banyak di tingkat
manusia, dengan satu algoritma, dari piksel, dan dari awal - dan ini
menakjubkan, dan kami pernah ke sana. diri! Tapi pada intinya pendekatan yang
kami gunakan juga benar-benar sangat sangat bodoh (walaupun kami mengerti mudah
membuat klaim semacam itu dalam retrospeksi). Lagi pula, kami ingin memandu
Anda melalui Gradien Kebijakan (PG), pilihan default favorit kami untuk menyerang
masalah RL saat ini. Jika Anda berasal dari luar RL, Anda mungkin penasaran
mengapa kami tidak menghadirkan DQN sebagai gantinya, yang merupakan algoritma
RL alternatif dan lebih dikenal, dipopulerkan secara luas oleh permainan ATARI
yang bermain. Ternyata Q-Learning bukanlah algoritma yang hebat (bisa dibilang
DQN jadi 2013 (oke kami 50% bercanda)). Sebenarnya kebanyakan orang lebih suka
menggunakan Gradien Kebijakan, termasuk penulis naskah DQN asli yang telah
menunjukkan Gradien Kebijakan agar bekerja lebih baik daripada Q Learning saat
menyetel dengan baik. PG lebih disukai karena bersifat end-to-end: ada
kebijakan eksplisit dan pendekatan berprinsip yang secara langsung
mengoptimalkan penghargaan yang diharapkan. Bagaimanapun, sebagai contoh yang
berjalan, kita akan belajar memainkan game ATARI (Pong!) Dengan PG, dari nol,
dari piksel, dengan jaringan syaraf yang dalam, dan semuanya 130 baris Python
hanya menggunakan numpy sebagai ketergantungan.
Pong dari piksel
Kiri: Pertandingan Pong. Kanan: Pong adalah kasus khusus dari
Markov Decision Process (MDP): Grafik di mana setiap simpul adalah negara
permainan tertentu dan setiap tepi adalah transisi kemungkinan (pada umumnya
probabilistik). Setiap sisi juga memberi poin, dan tujuannya adalah untuk
menghitung cara bertindak yang optimal dalam keadaan apapun untuk memaksimalkan
penghargaan.
Permainan Pong adalah contoh bagus dari tugas RL sederhana. Dalam
versi ATARI 2600 kami akan mengajak Anda bermain sebagai salah satu
dayung (yang lainnya dikendalikan oleh AI yang layak) dan Anda harus memantul
bola melewati pemain lain. Pada tingkat rendah permainan bekerja sebagai berikut: kita menerima
bingkai gambar (array 210x160x3 byte (bilangan bulat dari 0 sampai 255
memberikan nilai piksel)) dan kita dapat memutuskan apakah kita ingin
memindahkan dayung ke atas atau ke bawah (misalnya biner pilihan). Setelah setiap pilihan simulator permainan menjalankan tindakan
dan memberi kami poin: Entah imbalan +1 jika bola melewati lawan, poin -1 jika
kami melewatkan bola, atau 0 sebaliknya. Dan tentu saja, tujuannya adalah menggerakkan
dayung sehinggamendapatkan banyak poin.
Ketika kita melalui solusi ini, ingatlah bahwa kita akan mencoba
membuat asumsi yang sangat sedikit tentang Pong karena kita diam-diam tidak
terlalu peduli dengan Pong; Kami peduli dengan masalah kompleks dan berdimensi
tinggi seperti manipulasi robot, perakitan dan navigasi. Pong hanyalah sebuah
mainan yang menyenangkan, sesuatu yang kita mainkan sementara kita mencari tahu
bagaimana menulis sistem AI yang sangat umum yang suatu hari bisa melakukan
tugas-tugas bermanfaat yang sewenang-wenang.
Jaringan kebijakan Pertama, kita akan menentukan jaringan
kebijakan yang mengimplementasikan pemain kita (atau "agen").
Jaringan ini akan mengambil keadaan permainan dan memutuskan apa yang harus
kita lakukan (bergerak ke atas atau bawah). Sebagai blok sederhana favorit
kami, kami akan menggunakan jaringan syaraf 2 lapisan yang mengambil piksel
gambar mentah (100.800 nomor total (210 * 160 * 3)), dan menghasilkan satu
angka yang menunjukkan probabilitas untuk naik UP. Perhatikan bahwa itu adalah
standar untuk menggunakan kebijakan stokastik, yang berarti bahwa kita hanya
menghasilkan probabilitas untuk bergerak ke atas. Setiap iterasi kita akan
sampel dari distribusi ini (yaitu melempar koin yang bias) untuk mendapatkan
pergerakan sebenarnya. Alasan untuk ini akan menjadi lebih jelas begitu kita
berbicara tentang pelatihan.
Dan untuk membuat hal-hal yang konkret di sini
adalah bagaimana Anda bisa menerapkan jaringan kebijakan ini dengan Python /
numpy. Misalkan kita diberi vektor x yang menyimpan informasi pixel
(preprocessed). Kami akan menghitung:H = np.dot
(W1, x) # menghitung aktivasi neuron lapisan tersembunyi
P = 1.0 / (1.0 + np.exp (-logp)) # fungsi sigmoid (memberi
kemungkinan naik)
Di mana dalam potongan ini W1 dan W2 adalah dua matriks yang kita
inisialisasi secara acak. Perhatikan bahwa kita menggunakan sigmoid
non-linearity di akhir, yang squashes probabilitas output ke kisaran [0,1].
Secara intuitif, neuron di lapisan tersembunyi (yang memiliki bobot yang diatur
di sepanjang barisan W1) dapat mendeteksi berbagai skenario permainan (misalnya
bola ada di atas, dan dayung kita ada di tengah), dan bobot di W2 kemudian
dapat Putuskan jika dalam setiap kasus kita harus pergi UP atau DOWN. Sekarang,
W1 dan W2 acak awal tentu saja menyebabkan pemain tersebut tersadar. Jadi
satu-satunya masalah sekarang adalah menemukan W1 dan W2 yang mengarah pada
permainan ahli Pong!
Cetak halus: preprocessing. Idealnya Anda ingin memberi makan
minimal 2 frame ke jaringan kebijakan sehingga bisa mendeteksi gerakan. Untuk
membuat hal-hal sedikit lebih sederhana kami akan melakukan sedikit persiapan
ulang. Kami benar-benar akan memberi umpan pada frame perbedaan ke jaringan
(yaitu pengurangan bingkai saat ini dan yang terakhir).
Kedengarannya tidak mungkin. Pada titik ini kami ingin Anda
menghargai betapa sulitnya masalah RL. Kami mendapatkan 100.800 nomor (210 *
160 * 3) dan meneruskan jaringan kebijakan kami (yang dengan mudah melibatkan
pesanan satu juta parameter di W1 dan W2). Misalkan kita memutuskan untuk pergi
ke UP. Permainan mungkin merespons bahwa kita mendapatkan 0 poin saat ini dan
memberi kami 100.800 nomor lagi untuk frame berikutnya. Kita bisa mengulangi
proses ini selama seratus timesteps sebelum kita mendapatkan poin tanpa nol!
Misalnya. Misalkan kita akhirnya mendapatkan +1. Itu bagus, tapi bagaimana kita
bisa tahu apa yang terjadi? Apakah itu sesuatu yang kita lakukan sekarang? Atau
mungkin 76 frame lalu? Atau mungkin ada kaitannya dengan frame 10 dan kemudian
frame 90? Dan bagaimana kita mengetahui mana dari jutaan tombol yang harus
diubah dan bagaimana, agar bisa lebih baik di masa depan? Kami menyebutnya
masalah penugasan kredit. Dalam kasus spesifik Pong kita tahu bahwa kita
mendapatkan +1 jika bola berhasil melewati lawan. Penyebab sebenarnya adalah
bahwa kita kebetulan memantulkan bola pada lintasan yang bagus, namun
sebenarnya kita sudah melakukan banyak bingkai lalu - mis. Mungkin sekitar 20
dalam kasus Pong, dan setiap tindakan yang kami lakukan kemudian tidak
berpengaruh pada apakah kami akan mendapatkan pahala atau tidak. Dengan kata
lain kita dihadapkan pada masalah yang sangat sulit dan hal-hal yang terlihat
sangat suram.
Pembelajaran yang perlu diperhatikan. Sebelum kita
terjun ke solusi Gradien Kebijakan, kami ingin mengingatkan Anda secara singkat
tentang pembelajaran yang diawasi karena, seperti yang akan kita lihat, RL
sangat mirip. Lihat diagram di bawah ini. Dalam pembelajaran yang diawasi
biasa, kami akan memberi umpan pada jaringan dan mendapatkan beberapa
kemungkinan, mis. Untuk dua kelas UP dan DOWN. Kami menunjukkan probabilitas log
(-1,2, -0,36) untuk UP dan DOWN daripada probabilitas mentah (30% dan 70% dalam
kasus ini) karena kami selalu mengoptimalkan probabilitas log dari label yang
benar (ini membuat matematika menjadi lebih baik, dan Adalah setara dengan
mengoptimalkan probabilitas mentah karena log monotonik). Sekarang, dalam
pembelajaran yang diawasi kita akan memiliki akses ke label. Misalnya, kita
mungkin diberitahu bahwa hal yang benar untuk dilakukan saat ini adalah pergi
ke UP (label 0). Dalam sebuah implementasi kita akan memasukkan gradien 1.0
pada probabilitas log UP dan menjalankan backprop untuk menghitung vektor
gradien ∇Wlogp(y=UP∣x). Gradien ini akan memberi tahu kita bagaimana kita mengubah setiap
parameter dari juta kita untuk membuat jaringan sedikit lebih cenderung
memprediksi UP. Misalnya, salah satu dari jutaan parameter dalam jaringan
mungkin memiliki gradien -2,1, yang berarti bahwa jika kita ingin meningkatkan
parameter tersebut dengan jumlah positif kecil (misalnya 0,001), probabilitas
log UP akan turun sebesar 2,1 * 0,001 (Penurunan karena tanda negatif). Jika
kemudian kami melakukan update parameter, yay, jaringan kami sekarang akan
sedikit lebih cenderung memprediksi UP ketika melihat gambar yang sangat mirip
di masa depan.
Gradien Kebijakan Oke, tapi apa yang kita lakukan jika kita tidak
memiliki label yang benar dalam pengaturan Belajar Penguatan? Inilah solusi
Gradien Kebijakan (sekali lagi lihat diagram di bawah ini). Jaringan kebijakan
kami menghitung probabilitas naik UP sebesar 30% (logprob -1.2) dan DOWN 70%
(logprob -0.36). Sekarang kita akan mengambil contoh tindakan dari distribusi
ini; Misalnya. Misalkan kita sampel DOWN, dan kita akan menjalankannya dalam
game. Pada titik ini perhatikan satu fakta menarik: Kita dapat segera mengisi
gradien 1,0 untuk DOWN seperti yang kita lakukan dalam pembelajaran di bawah
pengawasan, dan menemukan vektor gradien yang akan mendorong jaringan untuk
sedikit lebih mungkin melakukan aksi DOWN di masa depan. Jadi kita bisa
langsung mengevaluasi gradien ini dan itu bagus, tapi masalahnya adalah
setidaknya untuk saat ini kita belum tahu apakah akan DOWN itu bagus. Tapi yang
penting adalah tidak apa-apa, karena kita bisa menunggu sebentar dan melihat!
Misalnya di Pong kita bisa menunggu sampai akhir permainan, lalu ambil reward
yang kita dapatkan (baik +1 jika kita menang atau -1 jika kita kalah), dan
masukkan skalar itu sebagai gradien untuk tindakan yang telah kita ambil (DOWN
pada kasus ini). Pada contoh di bawah ini, DOWN akan berakhir sampai kalah game
(-1 reward). Jadi jika kita mengisi -1 untuk probabilitas log DOWN dan
melakukan backprop kita akan menemukan gradien yang menghambat jaringan untuk
mengambil aksi DOWN untuk masukan itu di masa depan (dan memang begitu, karena
mengambil tindakan tersebut menyebabkan kita kehilangan permainan ).
Dan begitulah: kami memiliki kebijakan stokastik yang melakukan
tindakan sampel dan kemudian tindakan yang pada akhirnya menghasilkan hasil
yang baik didorong di masa depan, dan tindakan yang dilakukan yang mengarah
pada hasil yang buruk berkecil hati. Juga, pahala bahkan tidak perlu menjadi +1
atau -1 jika kita memenangkan permainan pada akhirnya. Ini bisa menjadi ukuran
yang sewenang-wenang dari beberapa jenis kualitas akhirnya. Misalnya jika
semuanya berjalan dengan baik, itu bisa jadi 10.0, yang kemudian akan kita
masukkan sebagai gradien dan bukan -1 untuk memulai backprop. Itulah keindahan
jaring saraf; Menggunakannya bisa terasa seperti kecurangan: Anda diperbolehkan
memiliki 1 juta parameter yang disatukan dalam 1 teraflop perhitungan dan Anda
dapat membuatnya melakukan hal-hal yang sewenang-wenang dengan SGD. Seharusnya tidak
bekerja, tapi menggelikan kita hidup di alam semesta dimana hal itu terjadi.
Protokol pelatihandi sini adalah bagaimana pelatihan
akan bekerja secara rinci. Kami akan menginisialisasi jaringan kebijakan dengan
beberapa W1, W2 dan memainkan 100 game Pong (kami menyebut "rollouts"
kebijakan ini). Mari kita asumsikan bahwa setiap permainan terdiri dari 200
frame jadi totalnya kita telah membuat 20.000 keputusan untuk naik ke atas atau
ke bawah dan untuk masing-masing kita mengetahui parameter gradien, yang
memberitahu kita bagaimana kita harus mengubah parameter jika kita ingin Dorong
keputusan itu di negara bagian itu di masa depan. Yang tersisa sekarang adalah
memberi label pada setiap keputusan yang telah kita buat sebagai baik atau
buruk. Misalnya anggaplah kita memenangkan 12 pertandingan dan kalah pada tahun
88. Kami akan mengambil semua 200 * 12 = 2400 keputusan yang kami buat di dalam
permainan yang menang dan melakukan pembaruan positif (mengisi +1,0 dalam
gradien untuk tindakan sampel, melakukan backprop, Dan update parameter
mendorong tindakan yang kami ambil di semua negara bagian tersebut). Dan kita
akan mengambil 200 lain lagi: 17600 keputusan yang kita buat dalam permainan
kalah dan melakukan pembaruan negatif (mengecilkan hati apa pun yang kita
lakukan). Dan ... itu dia. Jaringan sekarang akan menjadi sedikit lebih mungkin
untuk mengulang tindakan yang berhasil, dan sedikit lebih kecil kemungkinannya
untuk mengulangi tindakan yang tidak berhasil. Sekarang kami memainkan 100 game
lagi dengan kebijakan baru kami yang sedikit membaik dan berkumur dan diulang.
Gradien Kebijakan: Jalankan sebuah kebijakan untuk sementara
waktu. Lihatlah tindakan apa yang menghasilkan penghargaan tinggi. Tingkatkan
probabilitasnya.
Ini adalah diagramdari 4
game. Setiap lingkaran hitam adalah beberapa status permainan (tiga contoh
keadaan divisualisasikan di bagian bawah), dan setiap panah adalah transisi,
yang diberi catatan dengan tindakan yang dijadikan sampel. Dalam hal ini kita
memenangkan 2 game dan kalah 2 game. Dengan Gradien Kebijakan, kami akan
mengambil dua pertandingan yang kami menangi dan sedikit mendorong setiap
tindakan yang kami lakukan di episode itu. Sebaliknya, kita juga akan mengambil
dua pertandingan yang kita hilang dan sedikit mengecilkan hati setiap tindakan
yang kita buat di episode itu.
Jika Anda memikirkan proses ini, Anda akan mulai menemukan
beberapa sifat lucu. Misalnya bagaimana jika kita melakukan aksi yang baik di
frame 50 (memantulkan bola kembali dengan benar), tapi kemudian merindukan bola
di frame 150? Jika setiap tindakan sekarang dicantumkan sebagai buruk (karena
kita kalah), bukankah itu akan mengecilkan mental yang benar pada frame 50?
Anda benar - itu akan terjadi. Namun, bila Anda mempertimbangkan proses lebih
dari ribuan juta game, kemudian melakukan bouncing pertama benar membuat Anda
sedikit lebih mungkin untuk menang di jalan, jadi rata-rata Anda akan melihat
lebih positif daripada pembaruan negatif untuk mental yang benar dan kebijakan
Anda. Akan berakhir melakukan hal yang benar.
Dalam penjelasan kami di atas, kami menggunakan istilah seperti
"mengisi gradien dan backprop", yang kami sadari adalah tipe
pemikiran khusus jika Anda terbiasa menulis kode backprop Anda sendiri, atau
menggunakan Torch di mana gradiennya eksplisit dan terbuka. Untuk bermain-main.
Namun, jika Anda terbiasa dengan Theano atau TensorFlow Anda mungkin sedikit
bingung karena kode tersebut disatukan di sekitar menentukan fungsi kehilangan
dan backprop sepenuhnya otomatis dan sulit dipecahkan. Dalam kasus ini,
pandangan alternatif berikut mungkin lebih intuitif. Dalam pembelajaran vanili
yang diawasi, tujuannya adalah untuk memaksimalkan Σilogp (yi|xi) ∑ilogp(yi∣xi)∑ilogp(yi∣xi) dimana xi,yixi,yiadalah contoh
pelatihan (seperti gambar dan labelnya). Gradien kebijakan sama persis dengan
pembelajaran yang diawasi dengan dua perbedaan kecil: 1) Kami tidak memiliki
label yiyi yang benar sehingga sebagai "label palsu" kami mengganti
tindakan yang kami lakukan untuk mengambil contoh dari kebijakan saat melihat
xixi, dan 2 ) Kami memodulasi kerugian untuk setiap contoh secara multiplisatif
berdasarkan hasil akhirnya, karena kami ingin meningkatkan probabilitas log
untuk tindakan yang berhasil dan menurunkannya bagi yang tidak melakukannya.
Jadi, dalam ringkasan kerugian kita sekarang terlihat seperti ∑iAilogp(yi∣xi)∑iAilogp(yi∣xi),di mana yiyi
adalah tindakan yang kita lakukan untuk sampel dan AiAi adalah angka yang kita
sebut keuntungan. Dalam kasus Pong, misalnya, AiAi bisa menjadi 1,0 jika kita
akhirnya menang dalam episode yang mengandung xixi dan -1,0 jika kita kalah.
Ini akan memastikan bahwa kita memaksimalkan probabilitas log tindakan yang
menghasilkan hasil yang baik dan meminimalkan probabilitas log dari yang tidak.
Jadi, pembelajaran penguatan sama persis dengan pembelajaran yang diawasi, namun
pada kumpulan data yang terus berubah (episode), diperkecil oleh keuntungan,
dan kami hanya ingin melakukan satu (atau sangat sedikit) pembaruan berdasarkan
masing-masing kumpulan data sampel.
Kami juga sedikit lebih banyak membahas pengembalian. Sejauh ini
kita telah menilai kebaikan setiap tindakan individu berdasarkan pada apakah
kita memenangkan pertandingan atau tidak. Dalam setting RL yang lebih umum kita
akan menerima beberapa reward rtrt setiap saat. Salah satu pilihan yang umum
adalah menggunakan poin diskon, jadi "poin akhir" pada diagram di
atas akan menjadi Rt=∑∞k=0γkrt+kRt=∑k=0∞γkrt+k,di mana γγ adalah angka antara 0 dan 1 Disebut
faktor diskon (misalnya 0,99). Ungkapan tersebut menyatakan bahwa kekuatan yang
digunakan untuk mendorong tindakan sampel adalah jumlah tertimbang dari semua
penghargaan setelahnya, namun penghargaan selanjutnya secara eksponensial
kurang penting. Dalam prakteknya, penting juga untuk menormalkan hal ini.
Sebagai contoh, anggaplah kita menghitung RtRt untuk semua 20.000 tindakan
dalam batch 100 rollthrough game Pong di atas. Salah satu ide bagus adalah
"membakukan" pengembalian ini (misal: kurangi mean, bagi dengan
standar deviasi) sebelum kita menghubungkannya ke backprop. Dengan cara ini
kami selalu memberi semangat dan mengurangi kira-kira setengah dari tindakan
yang dilakukan. Secara matematis Anda juga bisa menafsirkan trik ini sebagai
cara untuk mengendalikan varians estimator gradien kebijakan. Eksplorasi yang
lebih mendalam dapat ditemukan di sini.
Kami juga ingin memberikan sketsa dari mana Gradien Kebijakan
berasal secara matematis. Gradien Kebijakan adalah kasus khusus dari estimator
gradien fungsi skor yang lebih umum. Kasus umum adalah bahwa ketika kita
memiliki ekspresi dari bentuk Ex∼p(x∣θ)[f(x)]Ex∼p(x∣θ)[f(x)] - i.e. yaitu harapan beberapa skor bernilai skalar Fungsi f (x) f (x) di
bawah beberapa distribusi probabilitas p (x; θ) p (x; θ) yang ditentukan oleh
beberapa θθ. Petunjuk singkat, f (x) f (x) akan menjadi fungsi reward kita (atau
fungsi keuntungan lebih umum) dan p (x) p (x) akan menjadi jaringan kebijakan
kita, yang benar-benar merupakan model untuk p (a|I) P (a|I), memberikan
distribusi atas tindakan untuk setiap gambar II. Kemudian kami tertarik untuk
menemukan bagaimana kita harus mengalihkan distribusi (melalui parameternya θθ)
untuk meningkatkan nilai sampelnya, seperti yang dinilai oleh ff (yaitu
bagaimana kita mengubah parameter jaringan sehingga sampel tindakan mendapat
imbalan lebih tinggi).
Kami memilikinya:
∇θEx[f(x)]=∇θ∑xp(x)f(x)Definisi harapan
=∑x∇θp(x)f(x)Jumlah wap dan gradien
=∑xp(x)∇θp(x)p(x)f(x)Keduanya mengalikan dan membagi dengan p (x)
=∑xp(x)∇θlogp(x)f(x)Gunakan fakta bahwa ∇θlog (z) = 1z∇θz
Definisi harapan
Untuk memasukkan ini ke dalam bahasa Inggris, kita memiliki
beberapa distribusi p (x; θ) p (x; θ) (kami menggunakan steno p (x) p (x) untuk
mengurangi kekacauan) yang dapat kita contoh (misalnya ini bisa menjadi
gaussian ). Untuk setiap sampel, kami juga dapat mengevaluasi fungsi skor yang
mengambil sampel dan memberi kami beberapa nilai skalar. Persamaan ini memberi
tahu kita bagaimana kita harus mengalihkan distribusi (melalui parameternya θθ)
jika kita ingin sampelnya mencapai nilai yang lebih tinggi, seperti yang
dinilai oleh ff. Secara khusus, ia mengatakan bahwa tampilan: menggambar
beberapa sampel xx, mengevaluasi nilai f (x) f (x), dan untuk setiap xx juga
mengevaluasi istilah kedua ∇θlogp(x;θ)∇θlogp(x;θ).Apa istilah kedua
ini? Ini adalah vektor - gradien yang memberi kita arah di ruang parameter yang
akan menyebabkan peningkatan probabilitas yang ditetapkan ke xx. Dengan kata
lain, jika kita ingin menyenggol θθ ke arah ∇θlogp(x;θ)∇θlogp(x;θ)kita akan melihat
probabilitas baru yang diberikan pada beberapa xx sedikit meningkat. Jika Anda
melihat kembali rumusnya, ini memberi tahu kita bahwa kita harus mengambil arah
ini dan mengalikannya dengan nilai skor skalar f (x) f (x). Hal ini akan
membuatnya sehingga sampel yang memiliki skor lebih tinggi akan
"menarik" pada kerapatan probabilitas lebih kuat daripada sampel yang
memiliki skor lebih rendah, jadi jika kita melakukan update berdasarkan
beberapa sampel dari pp maka kerapatan probabilitas akan bergeser sekitar Arah
skor yang lebih tinggi, membuat sampel dengan skor tinggi lebih mungkin
terjadi.
Sebuah visualisasi dari skor fungsi gradient estimator. Kiri:
Distribusi gaussian dan beberapa contoh darinya (titik biru). Pada setiap titik
biru kita juga memplot gradien probabilitas log berkenaan dengan parameter mean
gaussian. Panah menunjukkan arah di mana rata-rata distribusi harus didorong
untuk meningkatkan probabilitas sampel tersebut. Tengah: Overlay beberapa
fungsi skor memberi -1 di mana-mana kecuali +1 di beberapa wilayah kecil
(perhatikan ini bisa menjadi fungsi skalar bernilai sewenang-wenang dan tidak
harus terdiferensialkan). Anak panah sekarang diberi kode warna karena karena
perbanyakan di update kita akan rata-rata menaiki semua panah hijau, dan tanda
panah merah negatif. Kanan: setelah update parameter, panah hijau dan panah
merah terbalik mendorong kita ke kiri dan ke arah bawah. Sampel dari distribusi
ini sekarang akan memiliki nilai harapan yang lebih tinggi, sesuai keinginan.
Kami harap koneksi ke RL jelas. Jaringan kebijakan kami memberi
kita contoh tindakan, dan beberapa di antaranya bekerja lebih baik daripada
yang lain (seperti yang dinilai oleh fungsi keuntungan). Bagian kecil
matematika ini memberi tahu kami bahwa cara untuk mengubah parameter kebijakan
adalah melakukan beberapa peluncuran, mengambil gradien dari tindakan sampel,
memperbanyaknya dengan skor dan menambahkan semuanya, itulah yang telah kami
lakukan di atas. Untuk derivasi dan diskusi yang lebih menyeluruh, kami
merekomendasikan ceramah John Schulman.
Baiklah, kami telah mengembangkan intuisi untuk gradien kebijakan
dan melihat sketsa derivasi mereka. Kami menerapkan keseluruhan pendekatan
dalam skrip Python 130 baris, yang menggunakan ATARI 2600 PANDA OpenAI Gym. Kami
melatih jaringan kebijakan 2 layer dengan 200 unit lapisan tersembunyi
menggunakan RMSProp pada batch 10 episode (setiap episode adalah beberapa lusin
game, karena permainannya menghasilkan skor 21 untuk kedua pemain). Kami tidak
menyetel hiperparameter terlalu banyak dan menjalankan eksperimen di Macbook kami
yang lamban, namun setelah berlatih selama 3 malam, kami berakhir dengan sebuah
kebijakan yang sedikit lebih baik daripada pemain AI. Jumlah total episode
kira-kira 8.000 sehingga algoritma tersebut memainkan kira-kira 200.000 game
Pong (cukup banyak bukan!) Dan menghasilkan total 800 update. Kami diberitahu
oleh teman bahwa jika Anda melatih GPU dengan ConvNets selama beberapa hari,
Anda dapat mengalahkan pemain AI lebih sering, dan jika Anda juga
mengoptimalkan hyperparameters dengan hati-hati, Anda juga dapat secara
konsisten mendominasi pemain AI (yaitu memenangkan setiap pertandingan
tunggal). Namun, kami tidak menghabiskan terlalu banyak waktu untuk melakukan
komputasi atau tweaking, jadi kita akan berakhir dengan AI Pong yang
menggambarkan gagasan utama dan bekerja dengan baik:
Bobot yang dipelajari. Kita juga bisa melihat bobot yang
dipelajari. Karena preprocessing setiap masukan kita adalah gambar perbedaan
80x80 (frame saat ini dikurangi frame terakhir). Kita sekarang bisa mengambil
setiap baris W1, merentangnya hingga 80x80 dan memvisualisasikannya. Berikut
adalah koleksi 40 (dari 200) neuron dalam kotak. Pixel putih adalah bobot
positif dan piksel hitam adalah bobot negatif. Perhatikan bahwa beberapa neuron
disetel ke jejak bola bouncing tertentu, dikodekan dengan bolak hitam dan putih
sepanjang garis. Bola hanya bisa berada di satu titik, jadi neuron ini
multitasking dan akan "memecat" beberapa lokasi bola sepanjang garis
itu. Bolak hitam dan putih menarik karena saat bola bergerak sepanjang jejak,
aktivitas neuron akan berfluktuasi sebagai gelombang sinus dan karena ReLU itu
akan "menyala" pada posisi terpisah dan terpisah di sepanjang jejak.
Ada sedikit kebisingan dalam gambar, yang kami asumsikan telah dikurangi jika kami
menggunakan regularisasi L2.
Kami belajar memainkan Pong dari
piksel mentah dengan Gradien Kebijakan dan hasilnya cukup baik. Pendekatannya
adalah bentuk tebakan dan cek yang bagus, di mana "tebakan" mengacu
pada penggolongan sampling dari kebijakan kami saat ini, dan "cek"
tersebut mengacu pada tindakan yang mendorong hasil yang baik. Modulo beberapa
rincian, ini merupakan keadaan seni dalam bagaimana kita saat ini mendekati
masalah belajar penguatan. Yang mengesankan bahwa kita dapat mempelajari
perilaku ini, namun jika Anda memahami algoritme secara intuitif dan Anda tahu
cara kerjanya, Anda setidaknya harus sedikit kecewa. Secara khusus, bagaimana
cara kerjanya?
Bandingkan dengan bagaimana manusia bisa belajar bermain Pong.
Anda menunjukkan permainan mereka dan mengatakan sesuatu di sepanjang baris
"Anda memegang kendali dayung dan Anda dapat memindahkannya ke atas dan ke
bawah, dan tugas Anda adalah memantul bola melewati pemain lain yang
dikendalikan oleh AI", dan Anda ' Kembali siap dan siap untuk pergi
Perhatikan beberapa perbedaannya:
Dalam pengaturan praktis, biasanya kami mengkomunikasikan tugas
dengan cara tertentu (misalnya bahasa Inggris di atas), namun dalam masalah RL
standar, Anda menganggap fungsi penghargaan sewenang-wenang yang harus Anda
temukan melalui interaksi lingkungan. Dapat dikatakan bahwa jika seorang
manusia masuk dalam permainan Pong tapi tanpa mengetahui apapun tentang fungsi
penghargaan (memang, terutama jika fungsi penghargaan bersifat statis tapi
acak), manusia akan memiliki banyak kesulitan untuk belajar apa yang harus dilakukan
kecuali Gradien Kebijakan akan acuh tak acuh, dan kemungkinan bekerja lebih
baik. Demikian pula, jika kita mengambil frame dan mengubah piksel secara acak
maka manusia kemungkinan besar akan gagal, namun solusi Gradient Policy kita
bahkan tidak bisa membedakannya (jika menggunakan jaringan yang terhubung
sepenuhnya seperti yang dilakukan di sini).
Seseorang membawa sejumlah besar pengetahuan sebelumnya, seperti fisika
intuitif (bola memantul, tidak mungkin melakukan teleport, tidak mungkin
tiba-tiba berhenti, ia mempertahankan kecepatan konstan, dll.), Dan psikologi
intuitif (lawan AI) menginginkan "Untuk menang, kemungkinan mengikuti
strategi yang jelas untuk bergerak menuju bola, dll.). Anda juga memahami
konsep "mengendalikan" dayung, dan itu merespons perintah tombol UP /
DOWN Anda. Sebaliknya, algoritma kita mulai dari nol yang secara bersamaan
mengesankan (karena berhasil) dan menekan (karena kita kekurangan ide konkret
untuk bagaimana tidak).
Gradien Kebijakan adalah solusi brute force, di mana tindakan yang
benar akhirnya ditemukan dan diinternalisasi menjadi sebuah kebijakan. Manusia
membangun model, kaya abstrak dan rencana di dalamnya. Di Pong, kami bisa
beralasan lawan cukup lamban sehingga bisa jadi strategi bagus untuk
memantulkan bola dengan kecepatan vertikal tinggi, yang akan menyebabkan lawan
tidak menangkapnya tepat pada waktunya. Namun, rasanya juga kita juga akhirnya
"menginternalisasi" solusi yang baik menjadi apa yang terasa lebih
mirip dengan kebijakan memori otot reaktif. Misalnya jika Anda mempelajari
tugas motor baru (misalnya mengendarai mobil dengan tongkat bergeser?) Anda
sering merasa diri Anda banyak berpikir di awal tapi pada akhirnya tugas
menjadi otomatis dan tidak berperasaan.
Gradien Kebijakan harus benar-benar mengalami penghargaan positif,
dan mengalaminya dengan sangat sering agar akhirnya dan secara perlahan
mengubah parameter kebijakan menjadi pengulangan pergerakan yang memberi
penghargaan tinggi. Dengan model abstrak kita, manusia dapat mengetahui apa
yang mungkin memberi penghargaan tanpa pernah benar-benar mengalami transisi
yang menguntungkan atau tidak menguntungkan. Kami menabrak mobil ke dinding
beberapa ratus kali sebelum kami perlahan-lahan mulai menghindari untuk
melakukannya.
Kiri: Montezuma's Revenge: permainan yang sulit untuk algoritma RL
kami. Pemain harus melompat turun, memanjat, mendapatkan kunci, dan membuka
pintu. Seorang manusia mengerti bahwa memperoleh sebuah kunci berguna. Contoh
komputer miliaran gerakan acak dan 99% waktunya jatuh ke kematiannya atau
terbunuh oleh monster tersebut. Dengan kata lain sulit untuk "tersandung
ke dalam" situasi yang menguntungkan. Benar: Game lain yang sulit disebut
Frostbite, di mana manusia mengerti bahwa segala sesuatunya bergerak, ada beberapa
hal yang bagus untuk disentuh, beberapa hal buruk untuk disentuh, dan tujuannya
adalah membangun bata igloo dari batu bata. Analisis yang bagus tentang
permainan ini dan diskusi tentang perbedaan antara pendekatan manusia dan
komputer dapat ditemukan di Mesin Bangunan yang Mempelajari dan Berpikir
Seperti Orang.
Kami juga ingin menekankan maksudnya, sebaliknya, ada banyak
permainan di mana Gradien Kebijakan akan dengan mudah mengalahkan manusia.
Secara khusus, apapun dengan sinyal poin yang sering dibutuhkan, refleks yang
cepat, dan perencanaan jangka panjang yang tidak terlalu banyak akan ideal,
karena korelasi jangka pendek antara penghargaan dan tindakan dapat dengan
mudah "diperhatikan" oleh pendekatan, dan Eksekusi dengan cermat
disempurnakan oleh polis. Anda dapat melihat petunjuk tentang hal ini yang
sudah terjadi pada agen Pong kami: ia mengembangkan strategi di mana ia
menunggu bola dan kemudian dengan cepat berlari untuk menangkapnya tepat di
tepi, yang meluncurkannya dengan cepat dan dengan kecepatan vertikal tinggi.
Agen tersebut mencatat beberapa poin berturut-turut untuk mengulangi strategi
ini. Ada banyak game ATARI dimana Deep Q Learning menghancurkan kinerja dasar
manusia dengan cara ini - mis. Pinball, Breakout, dll.
Sebagai kesimpulan, setelah Anda memahami "trik" yang
digunakan algoritma ini, Anda dapat memberi alasan melalui kekuatan dan
kelemahan mereka. Secara khusus, kita tidak berada di dekat manusia dalam
membangun representasi permainan yang abstrak dan kaya yang dapat kita rencanakan
di dalam dan digunakan untuk pembelajaran cepat. Suatu hari komputer akan
melihat array piksel dan melihat sebuah kunci, sebuah pintu, dan berpikir untuk
dirinya sendiri bahwa mungkin ide yang bagus untuk mengambil kunci dan mencapai
pintu. Untuk saat ini tidak ada yang dekat dengan ini, dan mencoba untuk sampai
ke sana adalah area penelitian yang aktif.
Perhitungan yang tidak dapat dibedakan dalam Neural Networks
Kami ingin menyebutkan satu aplikasi menarik dari Gradien
Kebijakan yang tidak terkait dengan permainan: Ini memungkinkan kita merancang
dan melatih jaringan syaraf tiruan dengan komponen yang melakukan (atau
berinteraksi dengan) perhitungan yang tidak dapat dibedakan. Idenya pertama
kali diperkenalkan di Williams 1992 dan baru-baru ini dipopulerkan oleh
Recurrent Models of Visual Attention dengan nama "perhatian keras",
dalam konteks model yang mengolah gambar dengan urutan sekilas jarak pandang
rendah (terinspirasi oleh kita sendiri Mata manusia). Secara khusus, pada
setiap iterasi, RNN akan menerima sepotong kecil gambar dan sampel lokasi untuk
melihat berikutnya. Misalnya RNN mungkin melihat posisi (5,30), menerima
sepotong kecil gambar, lalu memutuskan untuk melihat (24, 50), dan lain-lain.
Masalahnya dengan gagasan ini adalah ada sepotong jaringan yang menghasilkan
Distribusi kemana harus mencari selanjutnya dan kemudian sampel darinya. Kamingnya,
operasi ini tidak dapat dibedakan karena, secara intuitif, kita tidak tahu apa
yang akan terjadi jika kita mencicipi lokasi yang berbeda. Secara umum, perhatikan
jaringan saraf dari beberapa input ke output:
Perhatikan bahwa sebagian besar panah (berwarna biru) dapat
didiferensiasi seperti biasa, namun beberapa transformasi representasi secara
opsional juga mencakup operasi sampling yang tidak dapat didiferensiasi
(berwarna merah). Kita bisa membalikkan melalui panah biru dengan baik, tapi
panah merah mewakili ketergantungan yang tidak dapat kita perbaiki.
Kita akan memikirkan bagian jaringan yang melakukan sampling
sebagai kebijakan stokastik kecil yang tertanam di jaringan yang lebih luas.
Oleh karena itu, selama pelatihan kami akan menghasilkan beberapa sampel
(ditunjukkan oleh cabang di bawah), dan kemudian kami akan mendorong sampel
yang akhirnya menghasilkan hasil yang baik (dalam hal ini misalnya diukur
dengan kerugian pada akhirnya). Dengan kata lain, kita akan melatih parameter
yang terkait dengan panah biru dengan backprop seperti biasa, namun parameter
yang terkait dengan panah merah sekarang akan diperbarui secara independen dari
arus balik dengan menggunakan gradien kebijakan, mendorong sampel yang
menyebabkan kerugian rendah. Ide ini juga baru saja diformalkan dengan baik
dalam Estimasi Gradien Menggunakan Grafik Perhitungan Stokastik.
Memori Pelatih I / O.
Anda juga akan menemukan ide ini di banyak makalah lainnya.
Sebagai contoh, Neural Turing Machine memiliki pita memori yang mereka baca dan
tulis. Untuk melakukan operasi tulis seseorang ingin melakukan sesuatu seperti
m [i] = x, di mana i dan x diprediksi oleh jaringan pengendali RNN. Namun,
operasi ini tidak dapat dibedakan karena tidak ada sinyal yang memberitahu kita
apa yang akan terjadi pada kerugian jika kita menulis ke lokasi yang berbeda j!
= I. Oleh karena itu, NTM harus melakukan operasi baca dan tulis yang lunak.
Ini memprediksikan distribusi perhatian (dengan elemen antara 0 dan 1 dan
menjumlahkan ke 1, dan memuncak di sekitar indeks yang ingin kita tulis), dan
kemudian melakukan semua i: m [i] = a [i] * x . Ini sekarang bisa dibedakan,
tapi kita harus membayar harga komputasi yang berat karena kita harus menyentuh
setiap sel memori hanya untuk menulis ke satu posisi. Bayangkan jika setiap
tugas di komputer kita harus menyentuh keseluruhan RAM!
Namun, kita bisa menggunakan gradien kebijakan untuk menghindari
masalah ini (secara teori), seperti yang dilakukan di RL-NTM. Kami masih
meramalkan distribusi perhatian, tapi alih-alih menulis dengan lembut, kami
sampel lokasi untuk ditulis ke: i = sampel (a); M [i] = x. Selama pelatihan,
kami akan melakukan ini untuk sekelompok kecil kami, dan pada akhirnya membuat
cabang apa pun yang bekerja paling baik. Keuntungan komputasi yang besar adalah
kita sekarang hanya perlu membaca / menulis di satu lokasi pada saat uji.
Namun, seperti yang ditunjukkan dalam makalah ini strategi ini sangat sulit
untuk bisa bekerja karena seseorang harus secara tidak sengaja tersandung oleh
algoritma kerja melalui sampling. Konsensus saat ini adalah bahwa PG bekerja
dengan baik hanya dalam pengaturan di mana ada beberapa pilihan diskrit
sehingga tidak ada pengambilan keputusan dengan cepat melalui ruang pencarian
yang sangat besar.
Namun, dengan Gradien Kebijakan dan dalam kasus di mana banyak
data / perhitungan tersedia, kita pada prinsipnya dapat bersikap besar -
misalnya kita dapat merancang jaringan syaraf tiruan yang belajar berinteraksi
dengan modul besar dan tidak terdiferensiasi seperti kompiler Lateks (misalnya
jika Anda Seperti char-rnn untuk menghasilkan lateks yang dikompilasi), atau
sistem SLAM, atau pemecah LQR, atau sejenisnya. Atau, misalnya, sebuah
superintelligence mungkin ingin belajar berinteraksi dengan internet melalui
TCP / IP (yang kamingnya tidak dapat dibedakan) untuk mengakses informasi
penting yang dibutuhkan untuk menguasai dunia. Itu contoh bagus.
Kami melihat bahwa Gradien Kebijakan adalah algoritma umum yang
kuat dan sebagai contoh, kami melatih agen ATARI Pong dari piksel mentah, dari
awal, dalam 130 baris Python. Secara umum algoritma yang sama dapat digunakan
untuk melatih agen untuk permainan sewenang-wenang dan suatu hari mudah-mudahan
pada banyak masalah pengendalian dunia nyata yang berharga. Kami ingin
menambahkan beberapa catatan lagi sebagai penutup:
Saat memajukan AI. Kami melihat bahwa algoritma tersebut bekerja
melalui pencarian brute force dimana Anda berkelana secara acak pada awalnya
dan tanpa sengaja harus tersandung pada situasi yang menguntungkan setidaknya
sekali, dan idealnya sering dan berulang kali sebelum distribusi kebijakan
menggeser parameternya untuk mengulangi tindakan yang bertanggung jawab. Kita
juga melihat bahwa manusia mendekati masalah ini dengan sangat berbeda, dalam
apa yang terasa lebih mirip bangunan model abstrak yang cepat - sesuatu yang
hampir saja kita gores permukaan penelitian (walaupun banyak orang mencoba).
Karena model abstrak ini sangat sulit (jika tidak mungkin) untuk secara
eksplisit memberi anotasi, inilah mengapa ada begitu banyak minat baru-baru ini
dalam model generatif dan induksi program yang tidak diawasi.
Di gunakan di setting robotika yang kompleks. Algoritma ini tidak
berskala naif dengan setting dimana eksplorasi dalam jumlah besar sulit
didapat. Misalnya, dalam pengaturan robot, seseorang mungkin memiliki robot
tunggal (atau sedikit), berinteraksi dengan dunia secara real time. Ini
melarang aplikasi algoritma naif karena kami mempresentasikannya di posting
ini. Salah satu bidang pekerjaan yang dimaksudkan untuk mengurangi masalah ini
adalah gradien kebijakan deterministik - alih-alih mensyaratkan sampel dari
kebijakan stokastik dan mendorong yang mendapatkan nilai lebih tinggi,
pendekatan menggunakan kebijakan deterministik dan mendapatkan informasi
gradien langsung dari jaringan kedua (disebut Seorang kritikus) yang memodelkan
fungsi skor. Pendekatan ini pada prinsipnya dapat lebih efisien dalam
pengaturan dengan tindakan berdimensi sangat tinggi di mana tindakan
pengambilan sampel memberikan cakupan yang buruk, namun sejauh ini tampaknya
agak sulit untuk bekerja dengan giat. Pendekatan lain yang terkait adalah
meningkatkan robotika, karena kita mulai melihat dengan ladang robot robot
milik Google, atau mungkin juga model Tes S + Autopilot Tesla.
Ada juga sederet pekerjaan yang mencoba membuat proses pencarian
kurang putus asa dengan menambah pengawasan tambahan. Dalam banyak kasus
praktis, misalnya, seseorang dapat memperoleh lintasan ahli dari manusia.
Misalnya AlphaGo pertama menggunakan pembelajaran yang diawasi untuk
memprediksi pergerakan manusia dari permainan Go yang ahli dan kebijakan
menirukan manusia yang dihasilkan kemudian disempurnakan dengan gradien
kebijakan pada tujuan "nyata" untuk memenangkan permainan. Dalam
beberapa kasus, seseorang mungkin memiliki lebih sedikit lintasan pakar
(misalnya dari teleoperasi robot) dan ada teknik untuk memanfaatkan data ini di
bawah payung pembelajaran magang. Akhirnya, jika tidak ada data yang diawasi
disediakan oleh manusia, hal itu juga dapat dalam beberapa kasus dihitung
dengan teknik pengoptimalan yang mahal, mis. Dengan optimasi lintasan dalam
model dinamika yang diketahui (seperti F = maF = ma dalam simulator fisik), atau
dalam kasus di mana seseorang mempelajari model dinamika lokal perkiraan
(seperti yang terlihat pada kerangka Pencarian Kebijakan Terpandu yang sangat
menjanjikan).
Saat menggunakan PG dalam praktek. Sebagai catatan terakhir, kami
ingin melakukan sesuatu yang kami harap telah kami lakukan di pos blog RNN kami.
Kami rasa kami mungkin telah memberi kesan bahwa RNN adalah sihir dan secara
otomatis melakukan masalah berurutan yang sewenang-wenang. Yang benar adalah
bahwa membuat model ini bekerja dapat menjadi rumit, membutuhkan perawatan dan
keahlian, dan dalam banyak kasus juga bisa menjadi berlebihan, di mana metode
sederhana bisa membuat Anda 90% + jalan ke sana. Hal yang sama berlaku untuk
Gradien Kebijakan. Mereka tidak otomatis: Anda memerlukan banyak sampel, itu
akan melatih selamanya, sulit untuk melakukan debug saat tidak bekerja. Kita
harus selalu mencoba pistol BB sebelum meraih Bazooka. Dalam kasus
Reinforcement Learning misalnya, satu dasar kuat yang harus selalu dicoba
terlebih dahulu adalah metode cross-entropy (CEM), pendekatan "tebak dan
cek tebakan stokastik yang sederhana yang terinspirasi secara longgar oleh
evolusi. Dan jika Anda bersikeras mencoba Gradien Kebijakan untuk masalah Anda,
pastikan Anda memperhatikan bagian trik di kertas, mulailah yang sederhana
dulu, dan gunakan variasi PG yang disebut TRPO, yang hampir selalu bekerja
lebih baik dan lebih konsisten daripada vanilla PG di praktek. Gagasan utamanya
adalah untuk menghindari perubahan parameter yang mengubah kebijakan Anda terlalu
banyak, karena ditegakkan oleh kendala pada perbedaan KL antara distribusi yang
diprediksi oleh kebijakan lama dan baru pada sekumpulan data (bukan gradien
konjugasi Instansiasi sederhana dari ini Ide bisa diimplementasikan dengan
melakukan pencarian garis dan pengecekan KL di sepanjang jalan).
Karakter/objek pada game
pong berbasis arduino.
Spesifikasi sistem yang akan dibuat adalah sebagai berikut:
·Menggunakan development board Arduino Uno
·Menggunakan FreeRTOS
sebagai operating system pada konsol
·Menggunakan joystick sebagai input, dimana player menggerakkan joystick ke atas atau ke bawah
·Menggunakan layar OLED
untuk menampilkan game Pong yang dijalankan
·Permainan terdiri dari
dua buah paddle, dimainkan oleh dua orang player, yang saling memantulkan bola, dengan objektif
menggolkan bola ke arah lawan sebanyak-banyaknya, ke daerah lawan yang tidak
ber-paddle
·Skor bertambah setiap
bola berhasil mencapai daerah lawan
·Permainan selesai ketika
skor salah satu pemain mencapai 10
Mengimplementasikan Mekanisme Karakter Game
Pong
Setelah objek muncul, maka kita perlu
mengimplementasikan mekanisme dasar game yang kira-kira sebagai berikut:
1.Objek
bola bergerak di koordinat x dan y
2.Objek
player bergerak mengikuti perintah dari joystick
3.Jika
bola menyentuh player, maka ia akan memantul
4.Jika bola berjalan melewati player, maka
bola dikembalikan ke posisi awal dan permainan dimulai lagi
Semua mekanisme ini akan berjalan
berulang-ulang selama game dimainkan. Oleh karena itu, ini semua akan dilakukan
di dalam fungsi yang belum kita sentuh sebelumnya.
Menampilkan Aset Grafik
Permainan Pong setidaknya membutuhkan 3 aset
grafik:
1.Grafik
untuk player 1
2.Grafik
untuk player 2
3.Grafik
untuk bola
Menggunakan aset
persegi panjanguntuk
kedua player, serta sebuah aset titik sebagai grafik untuk bola.
2.Pemodelan Sistem
Pemodelan sistem dilakukan untuk mempermudah
proses desain game sehingga memudahkan
pengertian desain yang dirancang. Pemodelan terdiri dari flowchart, state chart, context diagram, dan data flow diagram.
Gambar 2.1 Context diagram dari game Pong
Terdapat satu buah proses dan tiga buah
terminator pada context diagram game Pong
dengan masing-masing flow yang
menghubungkan terminator dan flow. Terminatornya
adalah input dari kedua player dan output di layar OLED, sedangkan prosesornya adalah
sistem game Pong tersebut dengan flow antar komponen seperti Gambar 2.1 di atas.
Gambar 2.2 Data flow diagram dari game Pong
Sistem game Pong yang kami
rancang memiliki dua buah input dari joystick masingmasing player. Player mengarahkan joystick ke
atas atau ke bawah sesuai keinginan dengan tujuan untuk mengontrol paddle menghindari bola masuk ke daerahnya. Ketika
bola mengenai paddle, bola akan memantul, akan
tetapi, ketika bola memasuki daerah lawan, skor akan bertambah.Pembacaandari joystick menghasilkan range angka 0 – 1024, dengan 0 berarti sangat ke
bawah, 1024 sangat ke atas, dan 511 dibiarkan di tengah. Prosesor mengambil
angka ini dan menerjemahkan range 0 – 510
menjadi player mengarahkan paddle ke
bawah, 512 – 1024 ke atas, dan 511 berarti paddle diam
saja.
Output dari proses penggambaran adalah keluaran keseluruhan permainan
yang mencakup pergerakan paddle, bola, dan
skor.
Gambar2.3 Flowchart task readJoystick pada game Pong
Task readJoystick berfungsi untuk membaca gerakan yang diberikan player pada penggerak joystick. Joystick sendiri
adalah resistor pembatas yang dapat memberikan nilai 0 – 1024 pada dua sumbu.
Sebelum task dapat diimplementasikan, task ini diinisiasi dengan meng-assign pin dari joystick di
Arduino. Jangka nilai dari joysticktersebut,
pada mikrokontroler, akan diterjemahkan menjadi perintah ke mikrokontroler.
Gambar 2.4 Flowchart task draw pada game Pong
Pada task ini, layar
OLED diinisiasi dengan library U8GLIB
yang terdapat di website referensi Arduino.
Setelah menginisiasi layar dengan resolusi yang tepat, keluaran dari
mikrokontroler akan tampil di layar OLED.
Task draw pada FreeRTOS Arduino diimplementasikan dalam loop do – while. Pertama, base statis dari game digambar
pada layar OLED, yaitu garis tengah pembatas area dua player. Selanjutnya, bola berupa piksel juga digambar
pada layar OLED, bersama dengan dua paddle player.
Gambar 2.5 Flowchart task drawPlayer pada game Pong
Task drawPlayer1 dan drawPlayer2 berfungsi untuk menggambar paddle kedua player yang
dapat digerakkan ke atas dan ke bawah sesuai arahan joystick. Task drawPlayer
akan diimplementasikan oleh task draw ke
layar OLED.
Gambar 2.6 Flowchart task drawBall pada game Pong
Task drawBall berfungsi untuk menggambar bola berupa piksel yang
akan memantul jika terkena paddle player dan
menambah skor jika memasuki area lawan.
Gambar 2.7 Flowchart task drawCentralLine pada game Pong
Task drawCentralLine berfungsi untuk menggambar garis putus-putus
di tengah layar yang membatasi dua area player.
Gambar 2.8 Flowchart game Pong
Ketika sistem mulai dijalankan, dilakukan
pendefinisian library, konstanta, dan variabel
yang digunakan. Setelah itu, dilakukan pendefinisian variabel dan task yang digunakan untuk membuat task, mengatur task, dan semaphore. Dilakukan inisiasi penggunaan joystick, layar OLED, dan variabel-variabel yang
berhubungan dengan game lainnya.
Setelah inisiasi keseluruhan selesai, pada layar
OLED digambar dasar permainan, yaitu paddle masing-masing
pemain, bola, dan garis pembatas. Masing-masing gambar memiliki task secara independen, yaitu drawPlayer1,
drawPlayer2, drawBall, dan drawCentralLine. Fungsi setiap task akan dijelaskan melalui masing-masing flowchart-nya. Untuk menghindari deadlock semua task, dibuat semaphore sebagai tanda pergantian keberjalanan task.
Implementasi Sistem
Algoritma diimplementasikan dengan arsitektur
FreeRTOS, sehingga task–task dieksekusi bergantian.
1.Task draw (ke layar OLED)
Task yang dijalankan secara iteratif ini berfungsi untuk memanggil
ketiga task draw lainnya setelah delay-delay yang ditentukan. Sebelum task ini dapat dijalankan, diperlukan inisiasi
dengan library U8GLIB yang disesuaikan dengan layar OLED.
2.Task readJoystick
Task ini akan membaca pergerakan player oleh joystick, menghasilkan angka sebagai masukan, dan
mengirim angka tersebut ke mikrokontroler. Oleh mikrokontroler, perintah berupa
angka tersebut diterjemahkan sebagai ‘paddle ke atas’
atau ‘paddle ke bawah’.
3.Task drawCentralLine
Task ini adalah rangkaian piksel yang ditampilkan persis di tengah
layar sebagai pembatas area player 1
dengan player 2.
4.Task drawBall
Task ini akan menggambar sebuah piksel yang berlaku sebagai bola. Bola
akan bergerak ke arah paddle player acak
pada permulaan permainan. Bola akan memantul jika mengenai paddle player dan akan menambah skor player lawan jika tidak mengenai paddle di areanya.
5.Task drawPlayer
Task ini akan menggambar dua buah garis, berlaku sebagai paddle untuk memantulkan bola, yang masing-masing
dapat dikontrol secara independen oleh dua player melalui
dua buah joystick.
4.Analisis Sistem
Pada proyek ini, shared
resources-nya adalah variabel-variabel global untuk masukan dan
keluaran. Variabel-variabel tersebut utamanya adalah integer yang akan diisi dengan nilai dari joystick dan akan diteruskan ke layar OLED, integer yang merupakan posisi bola di layar,
dan integer posisi paddle di
layar.
Karena oleh sistem, masukan dan keluaran
dibutuhkan untuk bekerja secara simultan, variabel yang digunakan yang
ditempatkan lokal di dalam task akan
membutuhkan parameter global untuk kontinuitas perubahan nilainya. Untuk meng-handle shared resources agar tidak terjadi deadlock pada keberjalanan task-task, digunakan semaphore yang
diimplementasikan di tiap task.
































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}